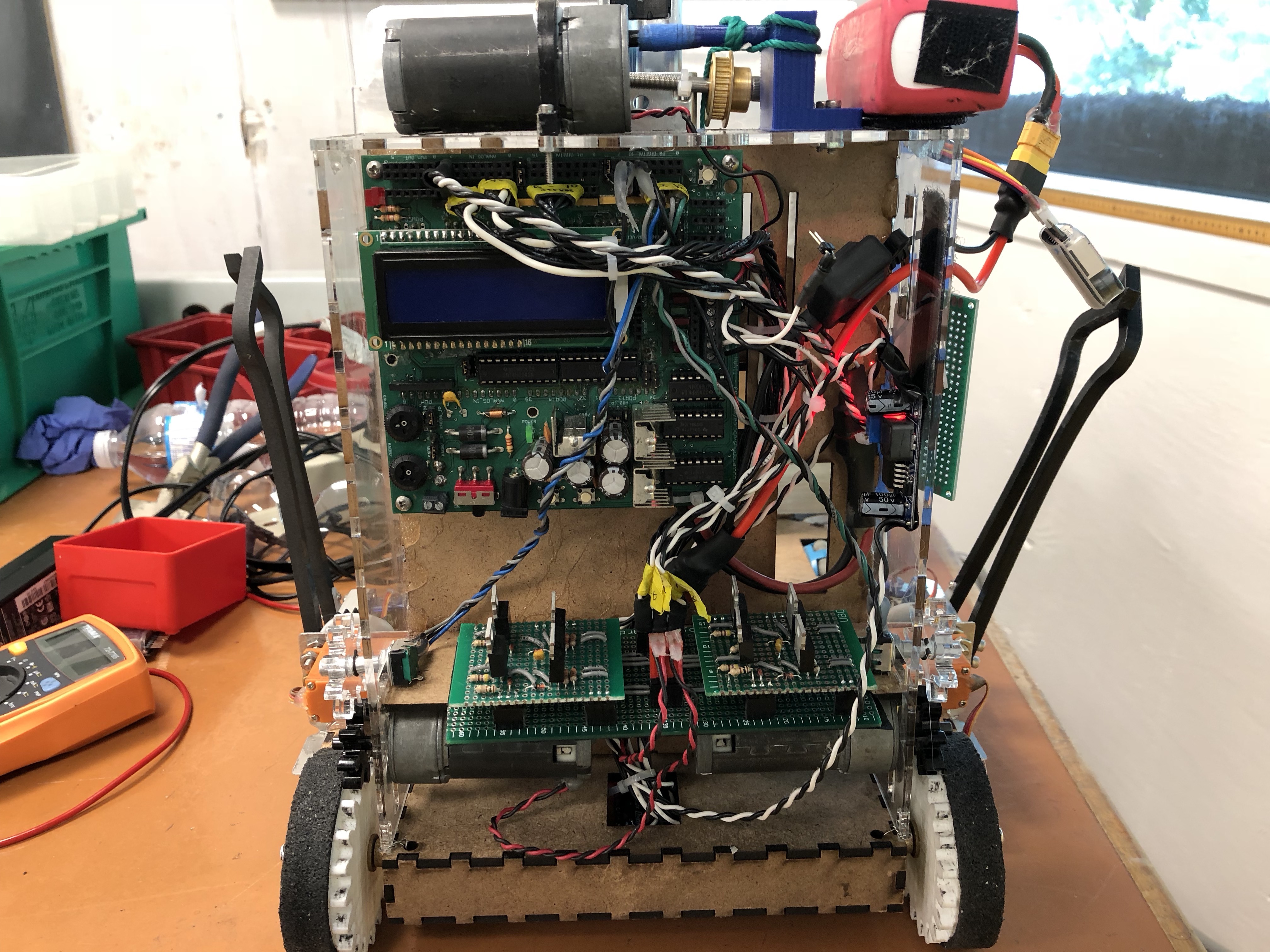
The electrical components of the robot were designed with modularity in mind in order to easily swap out broken parts in case of failure. The robot contained dedicated circuits for signal detection, motor control, line/edge detection, power regulation, as well as several adapter boards to connect the circuits to the main processor, the TINAH board.





.png)